

プロフィール
- 所属
-
造形学部 スマートデザイン学科
造形学研究科 デザイン学専攻
- 役職・職名
- 准教授
- 最終学歴
- 豊橋技術科学⼤学⼤学院⼯学研究科博⼠課程電⼦・情報⼯学専攻単位修得満期退学
- 学位
- 博⼠ (⼯学)
- 研究キーワード
- ロボット、ノンバーバル・コミュニケーション、ファシリテーション、デザイン
- 所属学会
- ヒューマンインタフェース学会
- 研究テーマ
- 多様な意見を収集し合意形成を促すファシリテーションロボットの構築と評価
TEACHER
受験生の皆さん、大学で「研究活動」を楽しみませんか。大学や企業の国内外の共同研究者と、学会発表の経験を積み、新たな知識・スキルを習得する充実した学習環境を提供できるのが大学です。とくに、このHuman-Robot Interaction 研究領域は、人工知能を有したロボットを機能させるための、情報、制御、プログラミングに関する知識の習得と、構築したロボットを評価するための実験、心理に関する知識の習得を必要とします。このような理系と文系の学際的な融合領域のなかで、新たなシステムを提案し、未来への視野を広げる観点を一緒に議論しましょう。

研究室の活動の様子

研究室で開発中の会話介在ロボット「ニュート」を用いたインタラクション実験の様子
3Dプリンタやレーザーカッターを用いてロボットをデザイン造形し、オリジナルなロボットを構築します。サーボモータを制御して、人とのコミュニケーションに必要な動作を生成します。ロボットの各センサから取得したデータは、サーバ側に送信されます。PythonやJavaを用いて、サーバ側のデータベースを構築します。ユーザが使用するインタフェース部は、Java ScriptやC#を用いて設計します。移動ロボットの実装は、ROS(Robot Operation System)を用いたプログラミングを行います。試作時(プロトタイピング)は、Scratchなどのヴィジュアルプログラミングを利用して行います。

第6回かわいい感性デザイン賞入賞・作品例:マイクを持ってテーブル上を動き回るロボットは、会話に入れない人への発話支援になるか?(科研費・若手(B)16K16102)
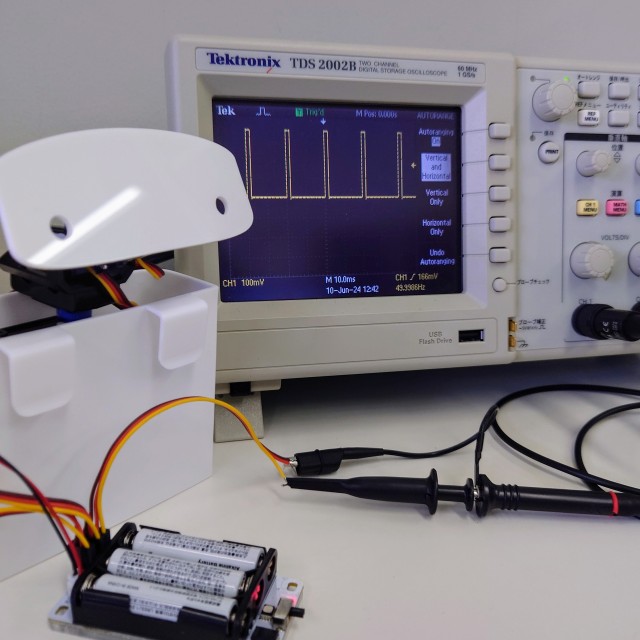
特殊な信号をサーボモータに送信してコミュニケーションロボットの動作を生み出す。
構築したロボットを、実際の人と人とのコミュニケーションに介在させて、どのような心的な効果を人に与えるのか、量的・質的の両側面から、効果の比較・検証を行います。具体的には、t検定(t-test)、カイ二乗検定(Chi-squared)、分散分析(ANOVA)などのオーソドックスな検定をはじめ、主成分分析、因子分析、クラスター分析などの多変量解析を用いて意味あるデータを導きます。ここで興味深い知見が得られれば、学会発表を行って、成果を社会に発信します。将来のロボット開発に役立つ指針がフィードバックされます。
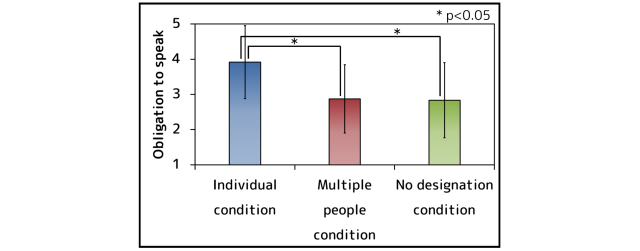
ロボットを介在させたインタラクション実験における主観評価の可視化例
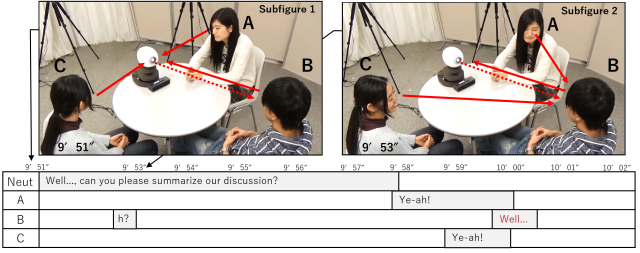
ロボットを介在させた会話分析の一例(ロボットの注視動作は次話者の決定に寄与するか?)
ヒューマンインタフェース論、テーラーメードサービスプロトタイピングⅠ、
テーラーメードサービスプロトタイピングⅡ、情報リテラシーⅠ、情報リテラシーⅡ、
情報処理基礎Ⅰ、卒業研究Ⅰ、卒業研究Ⅱ
1. ヒューマンインタフェース学会 評議員
2. 電子情報通信学会ヒューマンコミュニケーション基礎(HCS)研究専門委員会 専門委員
[1] Naoki Ohshima, Hiroko Tokunaga, Ryo Fujimori, Hiroshi Kaneko, Naoki Mukawa: "Designing Conversational Human-Robot Collaborations in Silence," In: Marcus, A., Rosenzweig, E., Soares, M.M. (eds) Design, User Experience, and Usability. HCII 2024. Lecture Notes in Computer Science, Vol. 14713, pp. 97-113, Springer, Cham. (2024).
[2] 大島直樹, 金子博, 武川直樹: 異能エージェントの提案―非日常的な体験を提供するエージェントの具現化―, ヒューマンインタフェース学会論文誌 Vol.26, No.2, pp. 225-228 (2024).
[3] Naoki Ohshima, Katsuya Iwasaki, Ryosuke Mayumi, Komei Hasegawa, Michio Okada: "Pocketable-Bones: Self-Augment Mobile Robot Mediating our Sociality," Journal of Robotics and Mechatronics Vol. 35, No. 3, pp. 723-733 (2023).